Made for ECE 4160
Artemis Setup
IMU + Sensor Fusion
Kalman Filter
Localisation in Simulation
Bluetooth Communication
Motors and Open Loop Control
Stunts
Real Localization
ToF Sensors
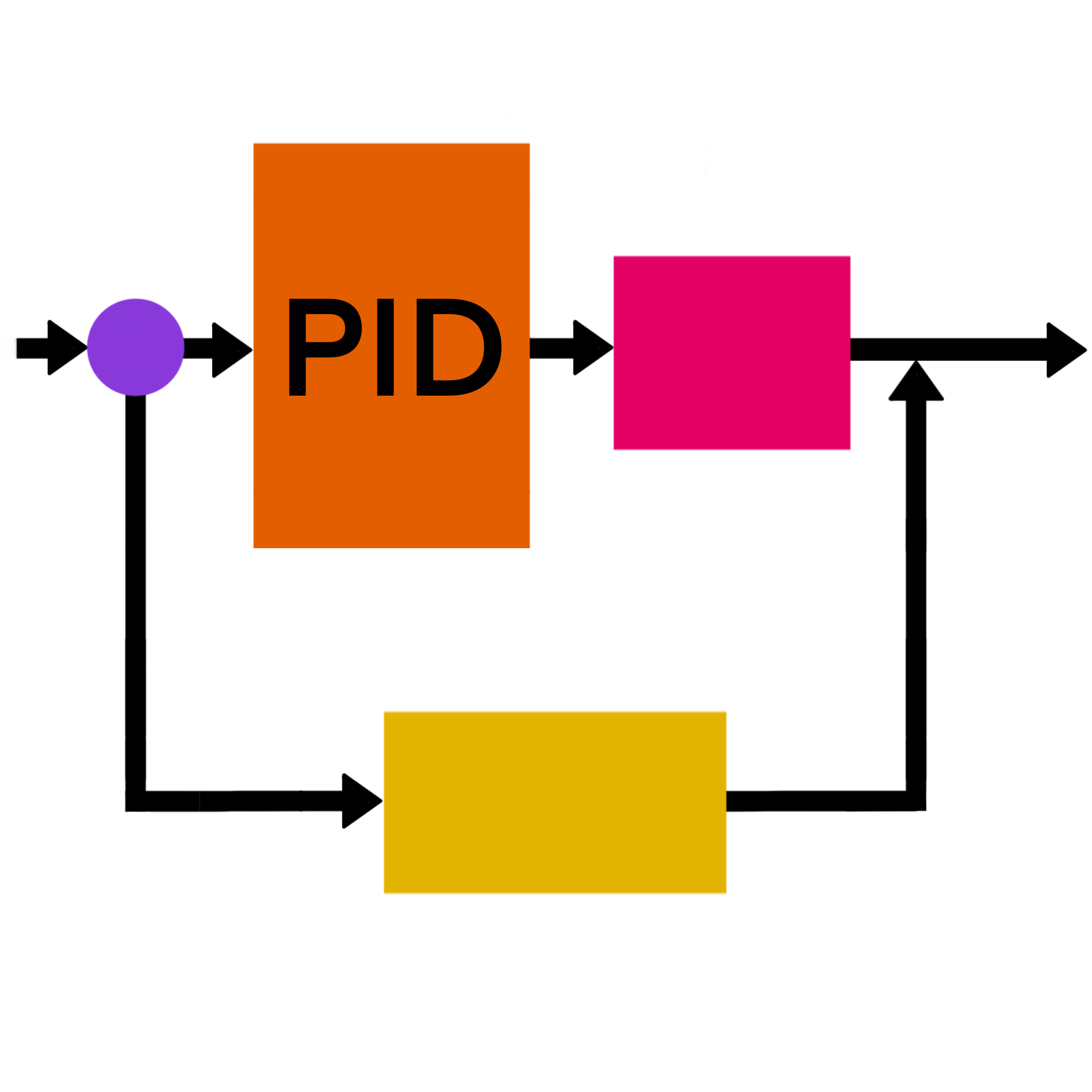
PID Control
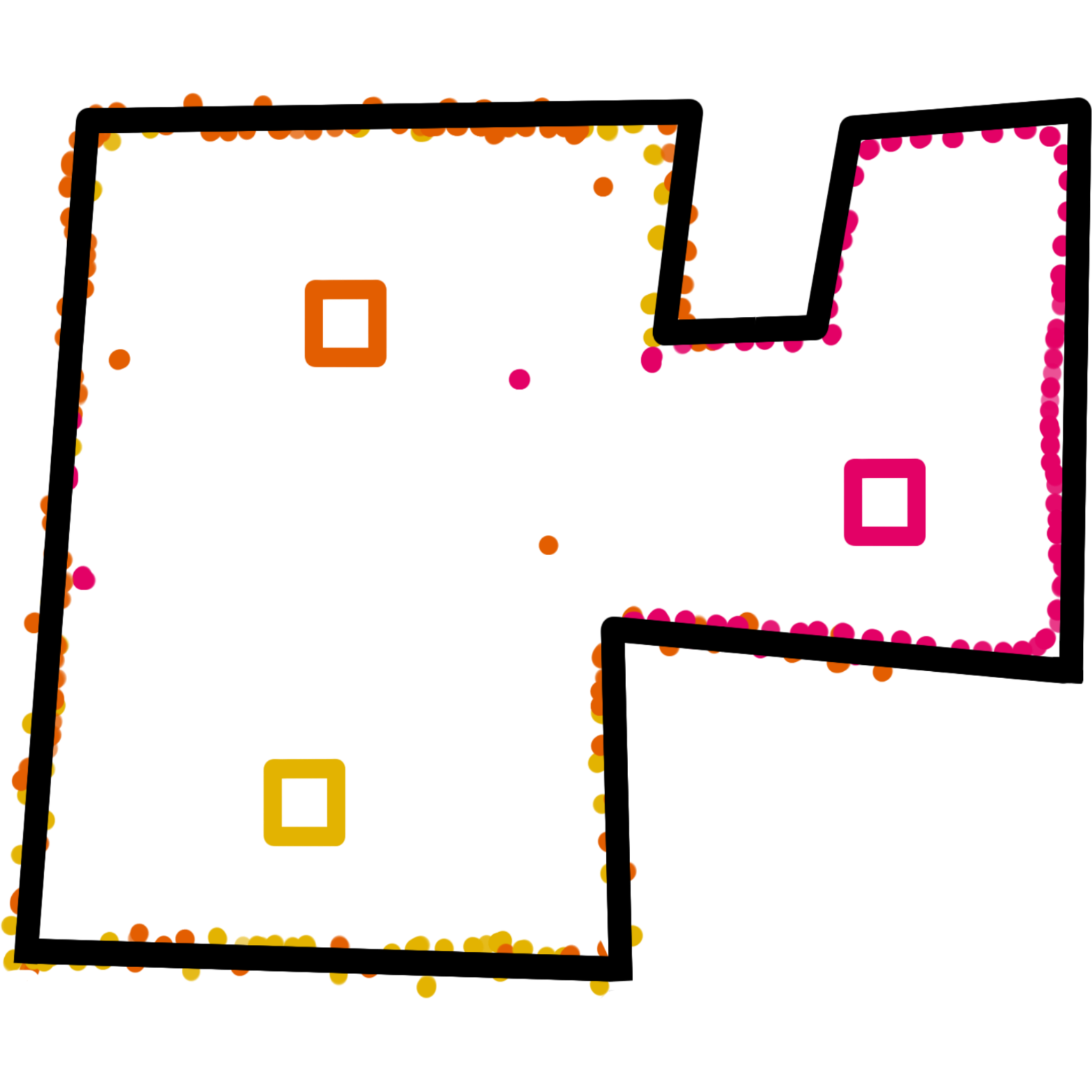
Mapping
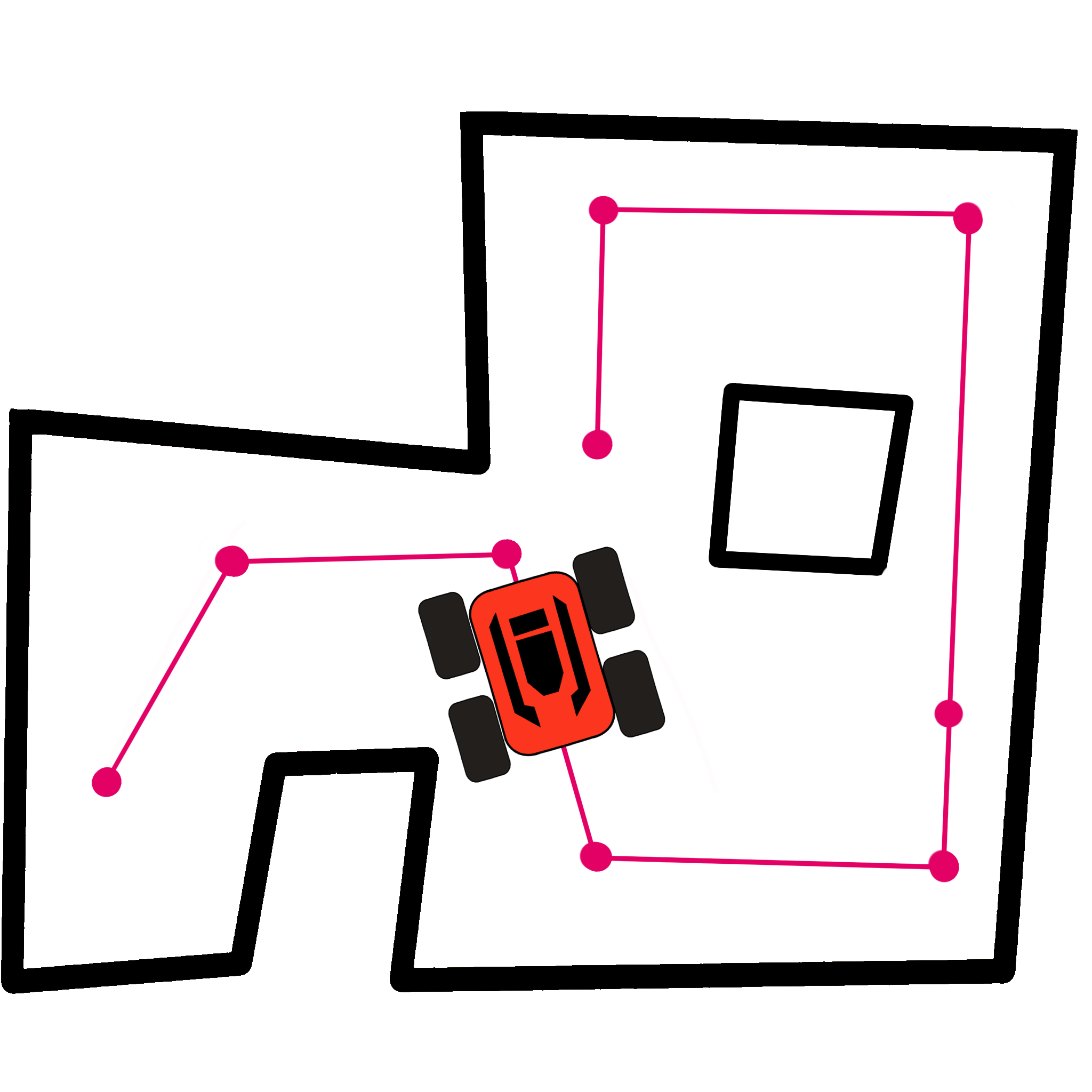
Path Planning & Execution